

Location: DEI – Politecnico di Bari
Lab head: Prof. Stefano Mazzoleni
Contact: stefano.mazzoleni@poliba.it
Lab Team









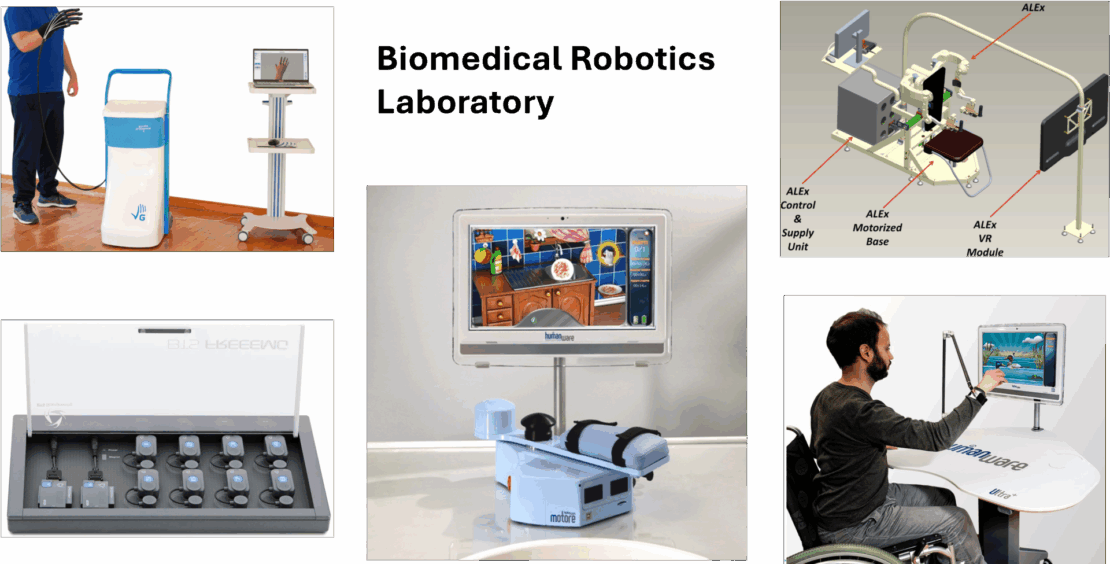
Lab Mission
The laboratory aims at developing tools and applications for biomedical robotics: rehabilitation and assistive technologies (wearable sensors, wheelchairs, exoskeletons, rehabilitation robots).
Link: https://labinfind.poliba.it/ricerca-scientifica/pnrr/brief/biorob/
Scientific publications
Brunetti, A., Buongiorno, D., Altini, N., Bevilacqua, V. Enabling Technologies for Optimized Diagnosis, Therapy and Rehabilitation: Obtained Results and Future Works. In: Bochicchio, M., Siciliano, P., Monteriù, A., Bettelli, A., De Fano, D. (eds) Ambient Assisted Living. ForItAAL 2023. Lecture Notes in Bioengineering. Springer, Cham. doi: 10.1007/978-3-031-63913-5_19
Suglia, V., Brunetti, A., Pasquini, G., Caputo, M., Marvulli, T. M., Sibilano, E., Della Bella, S., Carrozza, P., Beni, C., Naso, D., Monaco, V., Cristella, G., Bevilacqua, V., Buongiorno, D. A Serious Game for the Assessment of Visuomotor Adaptation Capabilities during Locomotion Tasks Employing an Embodied Avatar in Virtual Reality. Sensors. 2023; 23(11):5017 doi: 10.3390/s23115017
Rashid, Adnan, and Tommaso Pecorella. Is 6LoWPAN-ND necessary?(Spoiler alert: Yes). Computer Networks (2024). doi: 10.1016/j.comnet.2024.110535
Devices

Computing Workstations for data analysis
Five desktop PCs and five laptops to support research activities.
Data sheet:
Note:

EMG wireless recording system
FREEEMG is a digital and wireless system for surface electromyography (EMG). The signal accuracy, complete absence of cables, lightweight design, and extremely small size of the probes allow for analysis of any type of movement without altering the motor gesture of the subject being examined.
Data sheet: Link
Note:

MOTORE
The MOTORE robotic platform consists of: manipulandum and accessories, electrically liftable structure, worktop, All In One PC with touchscreen, numerous clinical scenarios, software for programming clinical scenarios that can be administered independently to the patient, software for the evaluation and comparison of performances, and software for remote maintenance.
Data sheet: Link
Note:

ULTRA+
The ULTRA+ mechatronic platform consists of: tracker and accessories, force sensor for grip activities, electrically liftable structure, worktop, All In One PC with touchscreen, numerous 2D/3D clinical scenarios, software for performance evaluation and comparison, software for programming clinical scenarios that can be administered independently to the patient, and software for remote maintenance.
Data sheet: Link
Note:
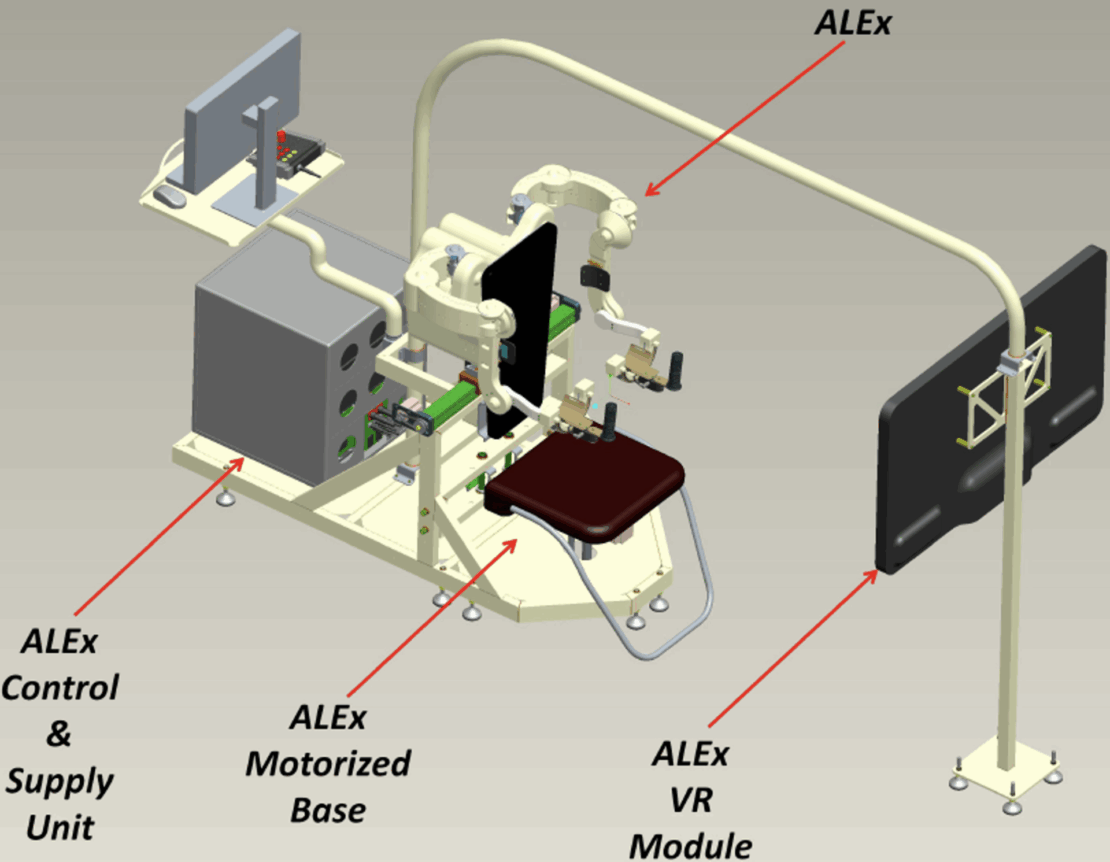
ALEx RS
ALEx RS is a fully functional equipment ideally suited to allow robotic assisted rehabilitation and associated researchers in the field. It is composed by four subsystems: Arm Light Exoskeleton (ALEx), ALEx Control & Supply Unit, ALEx Motorized Base and ALEx Virtual Reality Module.
Data sheet: Link
Note:

Gloreha platform
The Gloreha platform is designed for hand rehabilitation and consists of: Gloreha Professional with two motor units, Notebook PC with pre-installed Gloreha Software and active licenses, electronic board for GAP Gloreha Active Package, Gloreha Motion Capture optical sensor unit (Leap Motion® technology), Maestro Trolley equipped with wheels with brakes, Gloreha Brace+Glove M Right, Gloreha Brace+Glove S Left, Gloreha Sensor Glove S Right, Gloreha Sensor Glove M Left, Gloreha Splint Accessories for wrist stabilization (large size), Gloreha Silicone Loop Set and accessories for the treatment of spastic fingers.
Data sheet: Link
Note:

Mobile robot, collaborative robot and soft hand
The robotic platform of Co-Robotics company is composed of a mobile robot mover-1 modified in the electrical system and in the mechanical structure to support a collaborative industrial robotic arm model Techman TM5M-900, a QBRobotics industrial robotic hand (model qb SoftHand Industry v1.0.0 R 24V KIT) and a camera for artificial vision applications (ORBECC ASTRA model).
Data sheet:
Note:

Humanware Hand Exoskeleton System
The HES exoskeleton is an innovative hand rehabilitation device with remote actuation via low inertia electric motors and Bowden cable transmission, featuring a modular design that allows independent control of each finger. It applies force on single phalanges (up to 40 N), offers anthropometric customization, and can be integrated with other rehabilitation systems. With embedded sensors and assist-as-needed control, it adapts support to the patient’s intentions and reproduces the natural therapist-patient interaction.
Data sheet:
Note: