

Location: Azienda Ospedaliera Universitaria Federico II – “Policlinico”
Lab head: Prof.ssa Fanny Ficuciello
Contact: fanny.ficuciello@unina.it
Lab Team

Fanny Ficuciello
Associate Professor

Antonella Imperato
Ph.D Student

Sara Ebraico
Administrative Assistant








Francesco Schetter
Research Assistant


Lab Mission
ICAROS Lab is the experimental facility of the PRISMA Team devoted to surgical robotics. The lab is equipped with a da Vinci Research Kit and several collaborative robots employed for research in interventional and surgical robotics. Cameras, EMG sensor kit and haptic interfaces are also available.
Devices
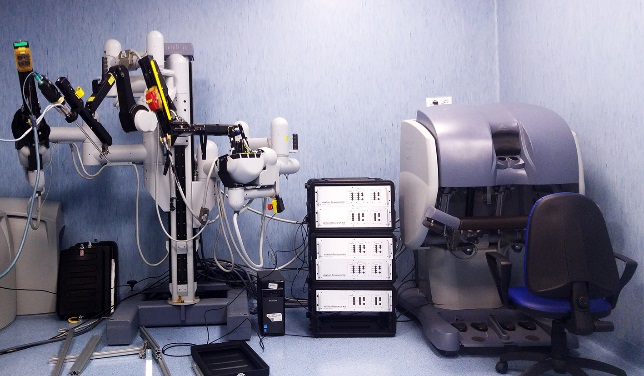
da Vinci Research Kit
An open research platform based on the renowned da Vinci System by Intuitive Surgical, designed for cutting-edge research in robotic surgery and teleoperation. The system features a surgeon’s console equipped with two Master Tool Manipulators (MTMs), each providing 8 degrees of freedom, allowing for intuitive and accurate instrument control.
On the patient’s side, it includes two Patient Side Manipulators (PSMs), each with 7 degrees of freedom, which replicate the surgeon’s hand movements via the MTMs. The control is further enhanced through coordinated foot-pedal actions, enabling seamless teleoperation. This platform is ideal for developing and testing new control algorithms, haptic feedback systems, and surgical automation.

BARTOLO Robot
Robot for transanal prostate biopsy, designed to ensure high precision and safety in urological procedures. The system supports a 3 kg payload and features 4 active degrees of freedom along with 2 passive degrees of freedom, offering flexibility and adaptability for accurate positioning.
It includes a soft wrist to enhance tissue interaction and minimize trauma during the intervention. The robot is compatible with the MicrUs Telemed ultrasound probe, allowing real-time imaging guidance throughout the procedure. With a total weight of 15 kg (excluding the controller), the platform is lightweight and suitable for seamless integration into clinical environments.
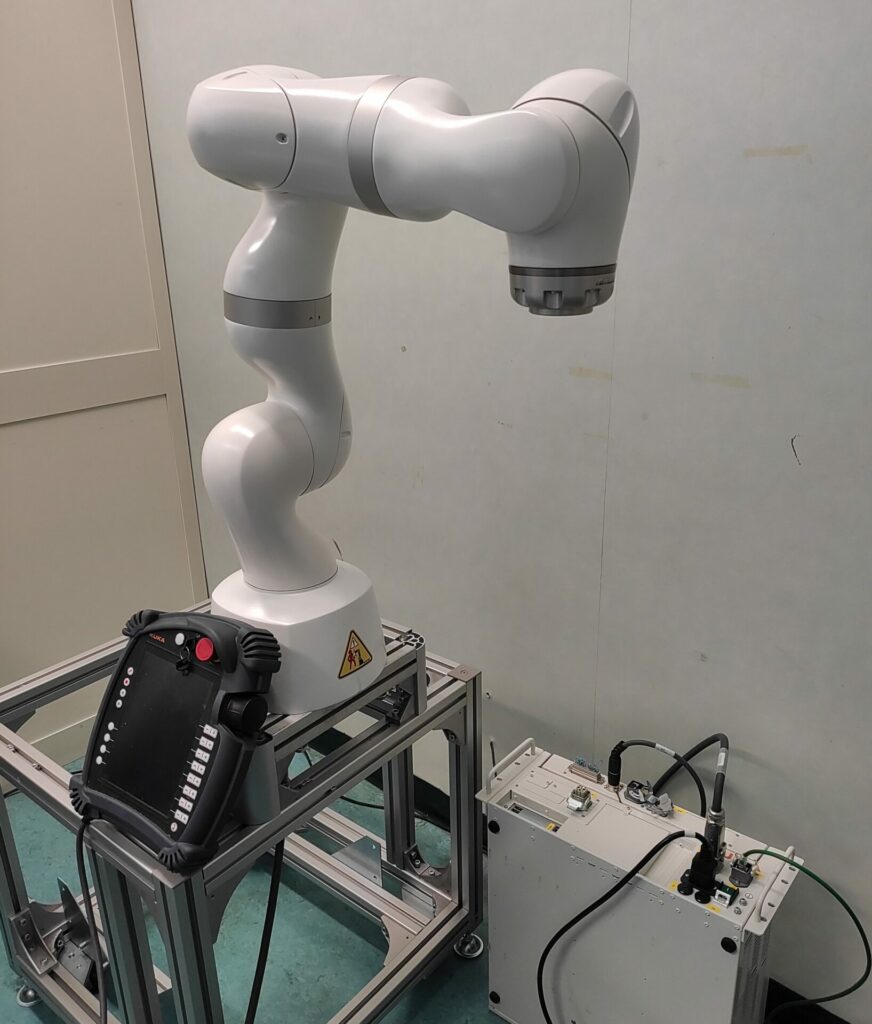
KUKA MED
Medical version of the KUKA LBR iiwa robot, developed for surgical and clinical applications requiring precise and collaborative motion. This 7-degree-of-freedom robotic arm supports a 7 kg payload and features an in-line wrist configuration, making it suitable for operations in confined spaces.
It includes a mounting flange compliant with DIN ISO 9409-1-A 50, compatible with a wide range of medical instruments and sensors. The system offers a repeatability of 0.1 mm according to ISO 9283 standards, ensuring highly accurate and consistent movements. Powered by the KUKA Sunrise cabinet, the platform is designed for seamless integration in advanced medical setups. The robot weighs 22 kg (excluding the controller), making it well-suited for mobile or modular deployment.
Data sheet: download
3D Scanner
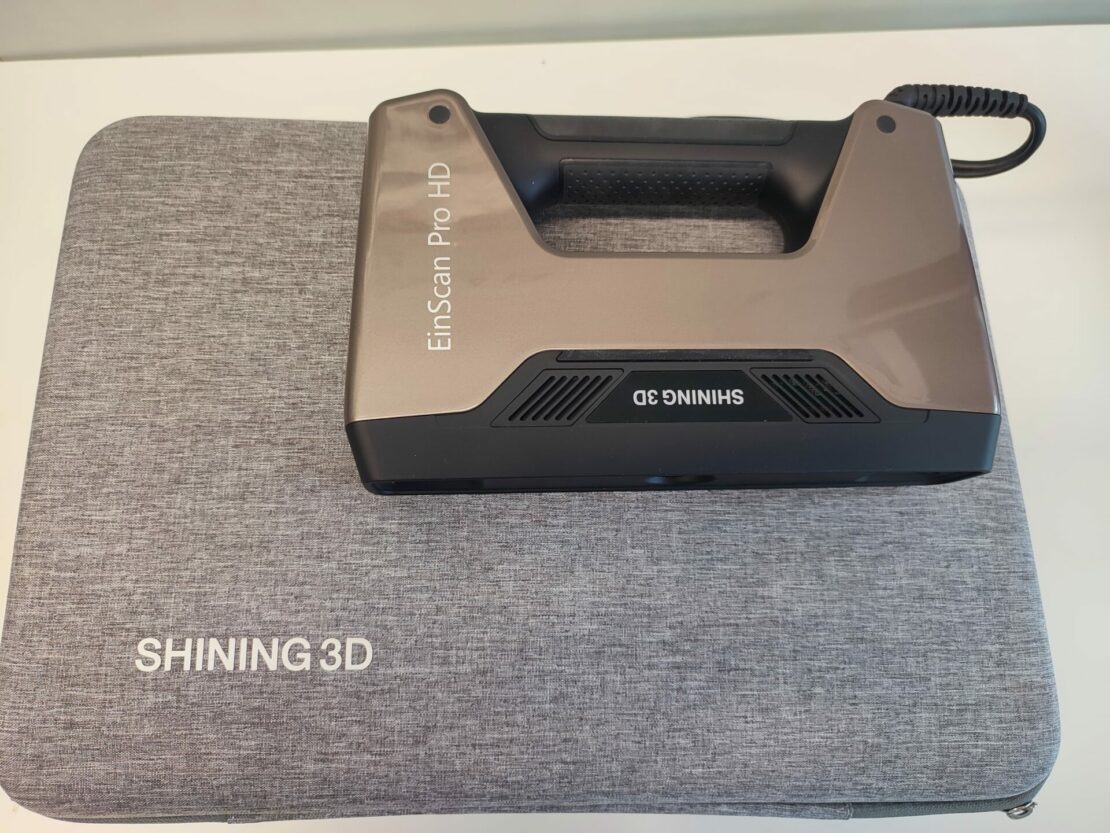
The EinScan Pro HD delivers outstanding performance in high-resolution and high-accuracy 3D scanning using a handheld setup. Its exceptional versatility and powerful hardware-software optimizations combine to provide a highly efficient and professional-grade 3D scanning experience.
With its upgraded lighting projection system and advanced software algorithms, the scanner can effectively capture dark-colored or black objects as well as shiny metal surfaces, greatly expanding its ability to scan a wide variety of materials with precision.
Data sheet: download

Silicon Printer
The S300X – LIQ21 | LIQ11 3D printer features a dual-head system configured in IDEX (Independent Dual Extrusion) mode: the LIQ21 two-component toolhead is dedicated to building the main part, while the LIQ11 single-component toolhead is optimized for water-soluble support structures.
Compatible with a wide range of materials, the printer supports industrial- and medical-grade silicone as well as polyurethane, offering great flexibility for different application needs. Additionally, it comes with a broad selection of nozzles, enabling customization of the printing process based on detail level, material viscosity, and extrusion speed requirements.
Data sheet: download
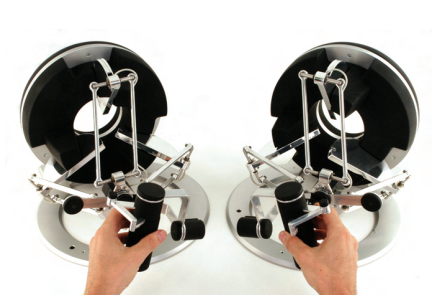
Omega 7 Haptic Device
With its unique active grasping extension, the omega.7 is the most versatile haptic device available. Its end-effector covers the natural range of motion of the human hand and is compatible with bi-manual teleoperation console design. The combination of full gravity compensation and driftless calibration contributes to greater user comfort and accuracy. Conceived and manufactured in Switzerland, the omega.7 is designed for demanding applications where performance and reliability are critical.
Data sheet: download

EEG & fNIRS
EEG and fNIRS allow the study of brain activity through different physiological processes generated by the same neural activity providing high temporal and spatial precision.
EEG-fNIRS data can be synchronized with each other through the use of the LSL protocol for effective wireless synchronization of the two data streams, the LSL protocol can also be used to send markers to both systems.
It is also possible to simultaneously send stimulation TTL triggers to fNIRS and EEG systems through the TriggerBox, Chronos and StimTracker.
Data sheet: download

Open Source Leg
The Open Source Leg (OSL) is an untethered robotic prosthetic leg designed by the Open-Source Bionic Leg Project, based out of the University of Michigan. The fully open-source device is a low cost, high performance robotic knee and ankle system designed to facilitate comparison between control strategies and to streamline the field
towards highly functional robotic prosthetic legs. Humotech has partnered with the OSL project to increase the accessibility and ease-of-use of the device in the research market by manufacturing the device and providing support services to researchers. The Humotech OSL is based on the University of Michigan’s OSL v2.0.
Data sheet: download

Exo 18 ExoActive
The ExoActive gives the possibility to provide targeted assistance, in an adjustable way, for activities involving efforts at the level of higher arts. In particular, thanks to the three levels of assistance available, the shoulder motors compensate for the lifting effort of the arm, reducing stress and overload while ensuring freedom of movement. The use of such a system allows to adapt the support for people with motor problems of different intensity, supporting them during daily activities with a dedicated and proportional support.

Ottobock Shoulder
Ottobock Shoulder supports employees in production and in the Craft for strenuous activities, especially overhead work. The weight of the lifted person is supported with a mechanical cable pull technique. This protects the muscles and joints in the Shoulder area noticeable and overhead activities can be carried out much more comfortably.
The Ottobock Shoulder is a passive exoskeleton that requires no energy supply and is therefore particularly lightweight.

MyCobot 280
The myCobot 280 M5Stack is a lightweight (under 1kg) collaborative robot arm with 6 degrees of freedom. Ideal for robotics research, artificial intelligence education, DIY, and commercial applications, it supports Python and ROS programming. This desktop robot arm can use a variety of end-effectors, and can lift and move objects up to 250g.
Data sheet: download