


Location: Istituto di Intelligenza Meccanica – Scuola Superiore Sant’Anna
Lab head: Dott. Massimo Satler
Contact: massimo.satler@santannapisa.it
Lab Team

Massimo Satler
Istituto di Intelligenza Meccanica

Matteo Unetti
Istituto di Intelligenza Meccanica

Giulia Bassani
Istituto di Intelligenza Meccanica

Carlo Alberto Avizzano
Istituto di Intelligenza Meccanica
Lab Mission
The laboratory provides a dedicated research facility for the investigation and development of advanced solutions at the intersection of robotics, computer science, and artificial intelligence. Its primary mission is to advance the automation of infrastructure inspection and environmental monitoring, with a particular focus on protection, safety, and sustainability.
The laboratory supports research on cooperative, autonomous, and decision-making algorithms for heterogeneous robotic systems—both terrestrial and aerial—operating either individually or in coordinated swarm configurations. These systems are designed to enable reliable, periodic monitoring of complex environments and the inspection of critical infrastructures.
Through its activities, TERRA aims to establish shared methodologies, tools, and best practices that can be readily adopted by industry and validated through cutting-edge research, fostering a strong transfer of innovation from laboratory to real-world applications.
Devices

Clearpath Husky A200
The Clearpath Husky A200 is a rugged unmanned ground vehicle (UGV) designed for outdoor research, and industrial robotics applications.
It features a high-torque skid-steer drivetrain and all-terrain tires for operation in harsh environments like mud, sand, rocks, and slopes up to 45° climb grade.
The platform can be used both with in ROS1 Noetic and ROS2 Humble and it supports the integration of manipulators and third party sensor payloads.
Data sheet: download
Note: N/A
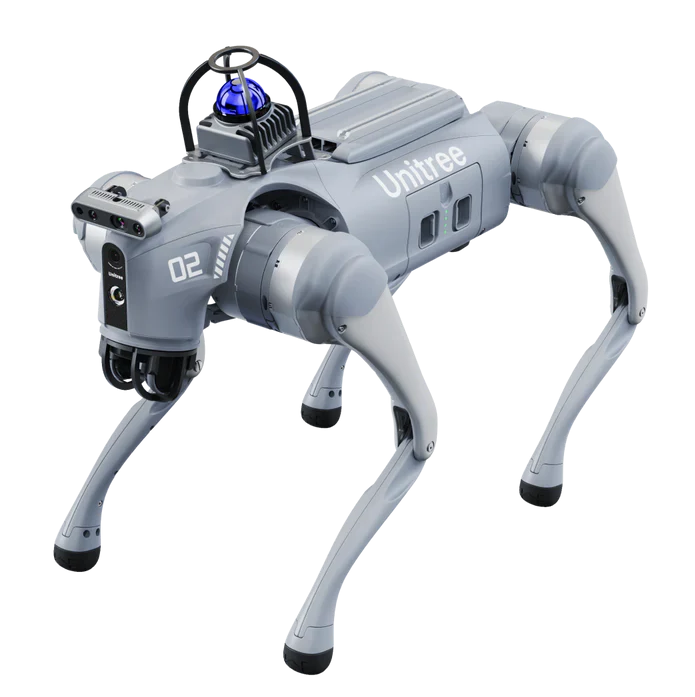
Unitree Go2 EDU Plus
The Unitree Go2 EDU Plus is a quadruped robot designed for education, research, and AI development, featuring enhanced computing power and modular payloads.
The EDU Plus version includes an additional embedded computer consisting in an NVIDIA Jetson Orin NX (100 TOPS), 4D LiDAR for 360°x90° ultra-wide perception, foot force sensors, voice recognition, advanced LiDAR like Mid-360, and a stereo camera. The platform is integrated with ROS 1 Noetic and ROS2 Humble allowing for autonomous navigation, mapping, and locomotion in complex terrain.
Data sheet: download
Note: N/A

Drone X500
Drone based on a quadcopter platform with an X4 frame configuration, designed to support fully autonomous flight operations.
It is equipped with onboard control and navigation systems enabling stable and reliable autonomous missions. The platform is fully integrated with ROS 1 Noetic, allowing seamless interaction with high-level planning, perception, and control modules, as well as easy integration within heterogeneous robotic systems and multi-robot architectures.
| Specification | Value |
|---|---|
| Companion computer | ASUS NUC 13 Pro NUC13ANKI7; 16GB RAM; 500GB SSD |
| On board sensors | Flir Boson 640×512 camera |
| Stereo Luxonis OAK-D W camera | |
| Ouster LIDAR Rev7 OS0-32 | |
| Garmin LIDAR-Lite 3 Laser Rangefinder | |
| Frame | X500 V2 frame |
| Motors | Motors T-motor MN3510 KV700 X500 |
| Propellers | Propellers T-motor P14x4.8 |
| Total weight (including batteries) (kg) | 3.8 |
| Thrust to weight | 2.6 |
| Dimensions (including propellers) (cm) | 76x76x45 |
| Endurance (minutes) | ~23 |
| Battery (Wh) | 2×99.9 |
| Max speed (m/s) | 10 |
Data sheet: download
Note: Usable only with technical supervision

Kinova Gen3 7DoF
The Kinova Gen3 7DoF is an ultra-lightweight collaborative robotic arm designed for research, and precise manipulation tasks, featuring seven degrees of freedom for enhanced dexterity.
It provides 1 kHz closed-loop control, infinite joint rotation, smart actuators with integrated torque sensors for accurate force control and smooth interaction, and embedded 2D/3D vision supports, while its lightweight and low power consumption allow for an easy integration on mobile robotic platforms.
The arm is paired with the Robotiq 2F-85 adaptive gripper which enables versatile grasping of objects up to 85 mm wide with 300 N force, ideal for teleoperation in mobile manipulation tasks.
Data sheet: download
Note: N/A

Sevensense Core Research
SevenSense CORE RESEARCH is a state-of-the-art visual-inertial sensor designed for advanced robotics research, particularly for ground-based robots. It enables navigation, SLAM (Simultaneous Localization and Mapping), semantic perception, depth detection, and obstacle avoidance, while also supporting dataset generation for AI development
The sensor features five high-sensitivity global-shutter cameras, paired with a synchronized IMU (Inertial Measurement Unit). CORE RESEARCH enable testing of VIO and VSLAM algorithms, data collection for machine learning models, and research into Visual AI in both indoor and outdoor environments.
Data sheet: download
Note: N/A
Ouster OS0 (rev 7) LiDAR
The Ouster OS0 Rev 7 is a high-resolution digital LiDAR sensor with an ultra-wide 90° vertical field of view (+45° to -45°) and 360° horizontal coverage, optimized for near-range applications like robotics, warehouse automation, and autonomous navigation. The 128-channel uniform configuration delivers up to 5.24 million points per second, powered by Ouster’s L3 chip.
It supports configurable resolutions (512, 1024, or 2048 pixels), rotation rates of 10 or 20 Hz, dual returns, and angular sampling accuracy of ±0.01° vertically and horizontally.
It includes built-in IMU for SLAM, calibrated reflectivity, near-infrared signal data, multi-sensor crosstalk suppression, and programmable options like phase lock, azimuth masking, and minimum range filtering. Connectivity via UDP over Gigabit Ethernet, with SDK, ROS drivers, and Ouster Studio for visualization.
Data sheet: download
Note: N/A

Livox Mid-360 LiDAR
The Livox Mid-360 is a time-of-flight LiDAR in compact and lightweight dome-shaped design with 360° horizontal and 59° vertical FOV (-7° to 52°), delivering 200,000 points per second at 10 Hz, up to 70 m range on 80% reflectivity, and IP67 rating for robust indoor and outdoor operation.
The Mid-360 is optimized based for the navigation and obstacle avoidance requirements of mobile robots. Measuring 65x65x60 mm and 265 g with ~6.5 W consumption, it embeds easily as a robotics payload, offering Ethernet connectivity, ROS compatibility, and reliable performance for 360° navigation and obstacle detection. This allows you to use the LiDAR with algorithms to deliver a wide range of functions such as SLAM and obstacle avoidance.
Data sheet: download
Note: N/A

Livox Avia LiDAR
The Livox AVIA is a compact LiDAR sensor designed for high-precision 3D perception in robotics and mapping. It features a non-repetitive scanning pattern across a 70.4° horizontal by 4.5° vertical FOV (effective up to 59° vertical), detecting up to 450 m on 80% reflectivity targets with a 0.1 m blind zone and 240,000 points per second at 10 Hz.
AVIA excels in generating dense point clouds, and long-range capability, making it ideal for UAV or portable systems capturing outdoor environments.
Data sheet: download
Note: N/A

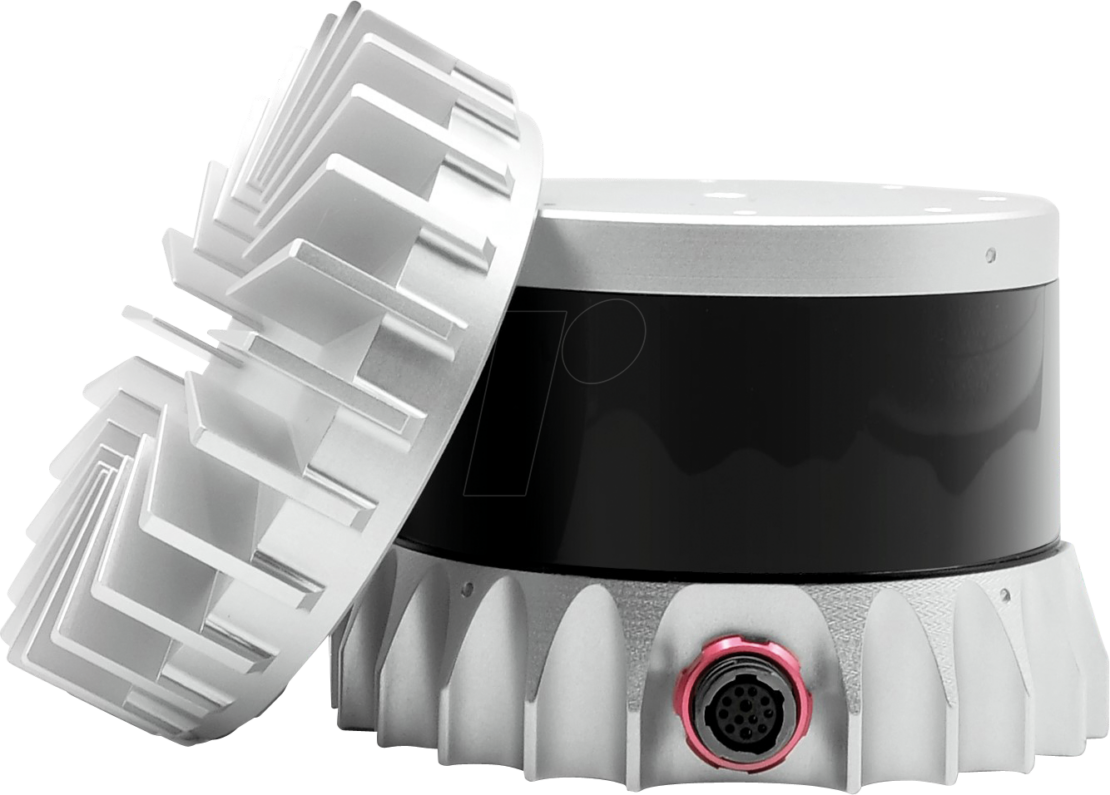
Orin NX embedded computing unit
The NVIDIA Jetson Orin NX 16GB module, delivering up to 100 TOPS of AI performance in a compact edge computing platform tailored for robotics and industrial applications. It combines an 8-core ARM Cortex-A78AE CPU at up to 2 GHz, a 1024-core NVIDIA Ampere GPU with 32 Tensor Cores, and 16GB 128-bit LPDDR5 memory with 102.4 GB/s bandwidth for real-time inference and processing.
It is ideal as an onboard compute unit for robotics platforms since it handles multi-sensor fusion from LiDARs like Ouster OS0 or Livox, SLAM, perception, and AI accelerated inference.
Data sheet: download
Note: N/A

LattePanda Sigma embedded computing unit
The LattePanda Sigma is a high-performance embedded computing unit powered by an Intel Core i5-1340P processor (12 cores/16 threads, up to 4.6 GHz turbo), suitable for demanding edge computing, robotics, and industrial tasks.
It is ideal as an onboard compute unit for robotics platforms demanding high performance in real-time. Compared with the Orin NX, this solution is based on a standard x86 architecture.
Data sheet: download
Note: N/A
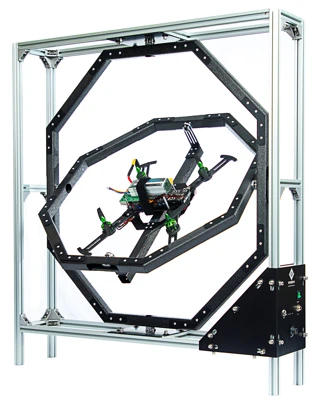
Eureka FFT Gyro
The FFT Gyro is a 3-DOF gyroscope test bed designed for safely developing and testing control algorithms for vertical take-off and landing vehicles, such as multi-rotor drones.
The system consist in a compact and light-weight gimbal structure featuring high-resolution encoders for accurate angle measurement, and slip rings for continuous rotation without cabling limits. Primarily used in educational labs or research settings, the FFT Gyro integrates with MATLAB/Simulink for rapid algorithm prototyping and validation of control laws. It allows hands-on study of vehicle dynamics, robustness testing under external forces, and safe experimentation with pitch, roll, and yaw motions.
Data sheet: download
Note: N/A

Tyto Robotics Thrust Stand Series 1585
The Series 1585 is a professional drone test stand from Tyto Robotics designed to measure and characterize propulsion systems for small to mid-sized drones, including thrust, torque, voltage, current, RPM, vibration, and efficiency. It supports brushless motors and propellers up to 16 inches in diameter, helping optimize flight time, payload capacity, and reliability for quadcopters, multirotors, and fixed-wing designs.
It consist in three load cells (main 5 kgf, two 2 kgf for torque) and it offers USB connectivity, ESC manual control via PWM (50 Hz default), safety cutoffs, real-time plots, CSV export, and automated testing (ramps, steps, Kv/pole measurement).
Data sheet: download
Note: N/A

Ultimaker Method XL
The UltiMaker Method XL is a professional desktop 3D printer optimized for large-scale ABS printing with industrial-grade accuracy and dual extrusion capabilities.
It features an actively heated chamber up to 100°C with VECT technology for 2x stronger Z-axis parts and minimal warping, plus a flexible build plate heating to 105°C for reliable adhesion. making It ideal for rapid prototyping of functional parts and engineering prototypes using materials like ABS, ASA, PC-ABS, Nylon, PETG, and Tough PLA.
Data sheet: download
Note: N/A
Stepcraft M1000 CNC
The STEPCRAFT M1000 is a robust, large-format CNC router designed for professional workshops, schools, and high-volume production with exceptional versatility and power.
The machine delivers rapid feeds up to 283 in/min (120 mm/sec) and precise repeatability of ±0.0005 inches. The modular tool supports allow to use the CNC router for milling, engraving, cutting, and carving across diverse materials. It is used to make custom robotic part in aluminium as well as in carbon fiber.
Data sheet: download
Note: Usable only with technical support.

VICON tracking system
The VICON-based tracking system consists of 10 VERO cameras deployed in an indoor flying arena measuring 4x6x3 meters, designed for testing both aerial robotics and terrestrial robots. This motion capture setup tracks and measures the pose of agents, including aerial vehicles and other objects inside the arena, with sub-millimeter accuracy of 1 mm at up to 333 Hz.
TERRA facility test area is shared with SAPIO facility, seamlessly integrating equipment for biomechanics analysis alongside robotics experiments, enabling combined motion tracking and physiological assessments. VICON Lock equipment has been setup allowing for third party equipment integration and synchronisation.
Software and Licensing
Full licenses for VICON’s proprietary software (Nexus and Tracker) ensure unrestricted access to real-time data processing, 3D reconstruction, and multi-agent pose estimation.
Note: Usable only with technical supervision